【コラム】 変化する未来自動車の5つの要素:第2回


コンテンツ
– SPACEとは?≫
– 電化(Electrification) ≫
– 連結性(Connectivity)
– 自律走行(Autonomous Driving)
– プラットフォーム(Platform)
– セキュリティ(Security)
※リンクをクリックすると、以前コンテンツをご覧できます。
連結性 (Connectivity)
モノのインターネットで分類されるデバイスとそうではないデバイスを仕分ける核心は連結性であり、モノのインターネットで最も重要な位置を占める自動車が従来の自動車と区別される核心機能もまた連結性である。従来の自動車にも連結性がなかったわけではない。携帯と自動車をBluetoothで連結して電話したり、音楽を聴くのも連結性である。モバイルアプリで自動車のドアを閉めたり開けたり、エンジンをかけるなどの機能を提供するテレマティクス(Telematics)も通信会社を通じた移動通信を使用している。
従来の自動車と区分してコネクティッドカー(Connected Car)と呼ばれる自動車は、従来の通信連結よりも幅広い連結性を追求している。自動車と自動車の間の通信であるV2V(Vehicle-to-Vehicle)、自動車と道路であったり、自動車とインフラ間の通信であるV2I(Vehicle-to-Infra)、自動車と電力網の間の通信であるV2G(Vehicle-to-Grid)、自動車とモバイル機器間の通信であるV2D(Vehicle-to-Nomadic Device)、自動車と家を連結するV2H(Vehicle-to-Home)などがこれに該当する。自転車、二輪車などの交通手段を使用したり、歩行者との通信であるV2P(Vehicle-to-Pedestrian)も新しい通信モデルとして浮上している。車両製造会社は、テレマティクスを通じた断片的サービスより、さらに幅広いサービス提供に向け、クラウドやオンラインサービス連結を提供できる通信モデルを準備している。この通信モデルは、V2N(Vehicle-to-Network)、V2S(Vehicle-to-Service)、V2C(Vehicle-to-Cloud)などの多様な名称で呼ばれている。
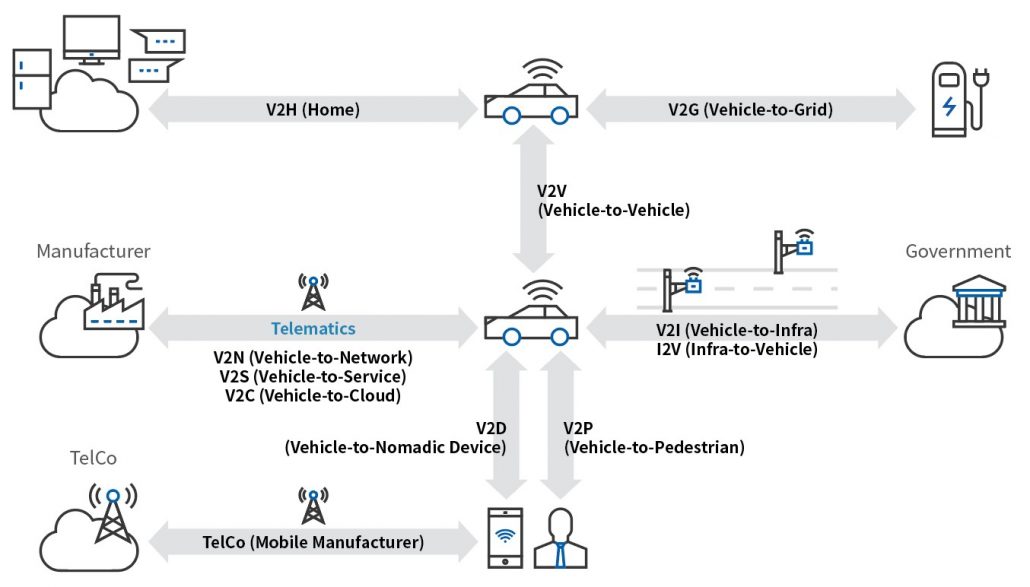
V2Gモデルは、前述した「電化」段落で説明したように、電気自動車が充電器を通じてSecondary Actorと連結されるサービスを反映したものだ。V2Hモデルで主導権を先取りするため、サムスン電子などの家電メーカー各社はスマート冷蔵庫やスマートテレビと自動車を連結する試みをしている。自動車製造会社であるフォルクスワーゲン(Volkswagen)は、2016年CES展示会でLG電子の冷蔵庫と連結するシナリオに対し、展示をしたことがある。最近は、音声認識機能を搭載したスマートスピーカーの躍進が目立っているが、これをリードするのがアマゾン(Amazon)のアレクサ(Alexa)サービスである。2018年CESでは自動車だけでなく、モノのインターネット(IoT)機器をアレクサと連結した製品がたくさん展示された。アレクササービスとアマゾンクラウドを媒介にし、自動車とモノのインターネット機器、家が連結されるシナリオが自然に完成されることができた。これと類似の試みは、アップルのカープレー(Apple–CarPlay)やグーグルのアンドロイドオート(Google–Android Auto)を通じても行われている。カープレーやアンドロイドオートを搭載した自動車は、アップルのクラウドやグーグルのクラウドを通じて、他のデバイスと簡単に連結できる。
各国政府が興味を持っている分野は、V2VとV2Iモデルだ。V2V通信を通じて、車両間の衝突事故を減らし、V2Iを通じて安全運転に必要な交通情報を提供することで、事故を減らして安全を高めることを目指している。米国・ヨーロッパ・日本・中国・韓国で推進されている次世代交通システム(C-ITS:Cooperative Intelligent Transportation System、協調型高度道路交通システム)事業はV2VとV2I通信に基盤して、交通システムを革新する事業だ。今後のV2Pモデルも次世代交通システムに反映されるものと予想される。
自動車製造会社がリードするV2C/V2SモデルとV2Hモデルを通じて、自動車は単なる移動手段ではなく、様々なオンラインサービスを活用する空間としての価値を高めて新しい事業を創出できるようになる。これらのサービスは、次世代自動車への変化であるSPACEの中で「プラットフォーム」部分と大きな関連性を持つ。
よく自動車の未来像をスマートカー(コネクティッドカーを含む意味)だと言う。自動車がスマート機器の一つになるということだ。私たちがすでに持っているスマート機器が一つある。スマートフォンである。スマートフォンには連結性がないと、特にインターネットがつながらないと仮定してみよう。もしくは、コンピューターでインターネット接続が出来ないと考えてみよう。たぶん、スマートフォンやコンピューターをどうやって使用しなければならないかを悩むようになるだろう。新たなスマート機器であるスマートカーも同じだ。自動車がスマートカーで進化するために必ず必要なものが連結性だ。
自動車の安全度を高めたり、活用度を高めるために連結性は重要な役割をするが、連結性を持つために通信チャネルが公開され、セキュリティ脅威も共存することになる。信頼できない主体が生成した誤った情報が自動車の運行を妨害したり、露出されたチャンネルを通じてハッカーの攻撃が入ったり、ハッカーが自動車を制御することも可能になる。IT環境でのセキュリティ事故は金銭的な被害で止まるが、自動車のセキュリティ事故は人の生命と安全と直結するために、その重要性が非常に、いや、最も高い。自動車が通信を通じて外部と安全に連結するためにはセキュリティが必ず解決しなければならない課題であるものだ。
自律走行 (Autonomous Driving)
未来が背景となるドラマや映画でよく登場する技術が自律走行だ。自律走行は、未来技術ではない。今も船舶や飛行機は自律走行機能をすでに適用し、運行している。船舶や飛行機は決められた航路に沿って自律走行をするが、自動車は道路の急変する状況に対処しなければならないため、自律走行を適用すことが簡単ではなく、まだ未完の技術として存在している。
海外のたくさんの企業が巨額の資金を投資し、自動車向けの自律走行技術を開発しており、自律走行自動車の交通事故で死亡者が発生したという記事も主要なニュースとして取り上げられている。
ある会社では自律走行3段階の技術を開発したとし、ある会社では自律走行4段階を開発したという。自律走行技術のレベルを定義した「SAE J3016標準」では自律走行段階を0~5段階に分けており、3段階以上を自律走行自動車(Autonomous Vehicle)と見ている。
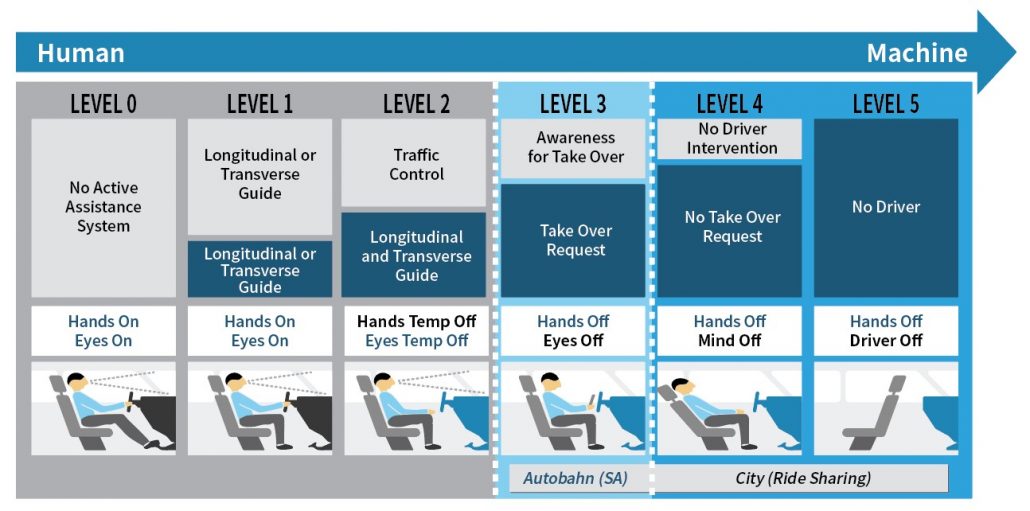
自律走行の4段階の技術は3段階の技術より優れた技術なのか。そうかもしれないが、そうではないかもしれない。米国運輸省(DoT:Department of Transportation)傘下の道路交通安全局(NHTSA:National Highway Traffic Safety Administration)が2016年に作成した「Federal Automated Vehicles Policy」ではODD(Operational Design Domain)を自律走行の構成要素に含めている。
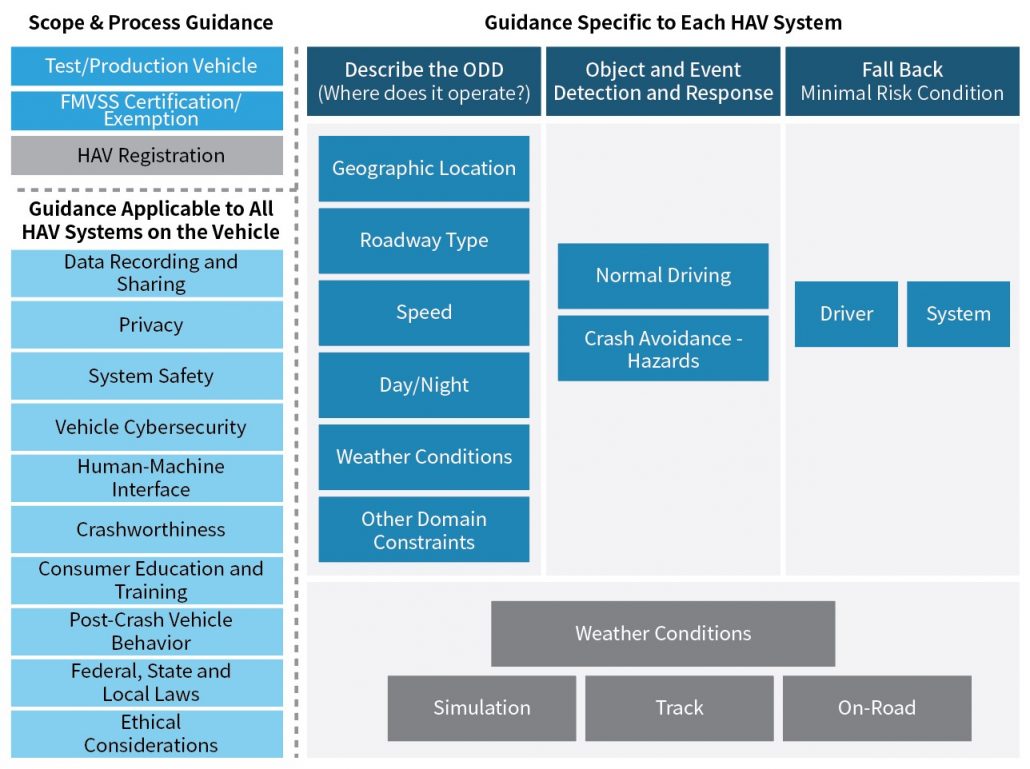
ODDは、自律走行が動作できる条件である地理的位置・道路類型・走行速度範囲・天気などの制約を含む。同一のODD条件から見ると、自律走行3段階の技術が自律走行4段階の技術より優れた技術であることは事実だが、ODDが異なれば、どの技術がさらに優れた技術なのかを判断することが容易ではない。快晴の天気でドイツのアウトバーンを走ることのできる自律走行4段階の技術と可視距離が数十メートルしかならない大雨の状況でも都心の繁華街を走ることができる自律走行3段階の技術を比較するのは難しいことだ。
アメリカのNHTSA文書では自律走行自動車が遵守すべき技術の要素としてサイバーセキュリティ(Cybersecurity)を明示している。自律走行とセキュリティは何の関係があるのだろうか。
自律走行自動車は、自動車に搭載されたカメラ、レーダー(radar)、ライダー(LiDar)、赤外線センサーなどの様々なセンサーを通じて周辺を認識して、どのように走行するかの判断をリアルタイムでする。センサーから収集したデータを分析し、リアルタイムで判断することがまだ未完の技術であり、悲劇的事故が発生したりもする。2016年に発生したテスラ自動車の交通事故は、左折する白いトレーラーの横面と空を区分しなかったせいで発生した事故だった。(*1) それなら、ハッカーがセンサーの正常動作を妨害したり、信号をかく乱し、自動車が誤った判断を下すよう誘導することも可能ではないか。人も真正面から強力な光を見ると、しばらくは前を見ることができない状態になる。同じく、自動車のカメラにも強力な光を照らすと、自動車はすぐ前の障害物も識別できなくなる。このような攻撃は高価な装備や高度の技術が必要なものではない。性能の良い電灯や大きな鏡だけあっても犯しかねない犯罪だ。車両が内蔵センサーだけで周辺の状況を判断することには限界があるため、自動車が周辺の他の自動車や道路と情報をやり取りしながら自律走行をすることになる。このような自律走行を「自律協力走行」という。
「連結性」で説明したV2V通信とV2I通信が自律協力走行でも使用されるものだ。外部との通信を通じて、周辺状況に対する情報を得るため、通信相手に対する信頼を検証し、通信チャンネルの信頼可否を検証することが必要になる。
自律走行で使用されるまた違う形の通信がある。自律走行タクシーを運営するタクシー会社を想像してみよう。タクシーを利用しようとする乗客がタクシー会社に要請すれば、タクシー会社はタクシーのうち、特定のタクシーにお客さまの状況を伝えなければならず、その前にタクシーの現状を会社がリアルタイムで把握し、顧客の需要が多発する所へタクシーを事前に移動させておくことも必要である。この場合にV2NもしくはV2Cモデルの通信を利用することになる。自律走行自動車は内蔵されたセンサーを使用するが、外部通信を使用することもあるためにこの通信のためのセキュリティが確保されなければならない。
続き>>
【出典】
*1:http://www.straitstimes.com/world/united-states/tesla-car-on-autopilot-crashes-killing-driver
※ 本コラムは、3回に分けて掲載されるます。